Predictive maintenance for rotating machines using machine learning models.
PythonScikit-learnSVMANN
This project focuses on developing a human obstacle detection and tracking system for warehouse robots.
C++OpenCVGit
Control logic is developed using Function Block Programming in Control IO and simulated in Factory IO.
Factory IOControl IO
Check out my Ladder Logic PLC code for some of the common industrial automation scenarios.
RSLogix 500Ladder Logic
This project focuses on developing a ROS2 package that enables a robot to navigate a warehouse environment.
C++ROS2Gazebo
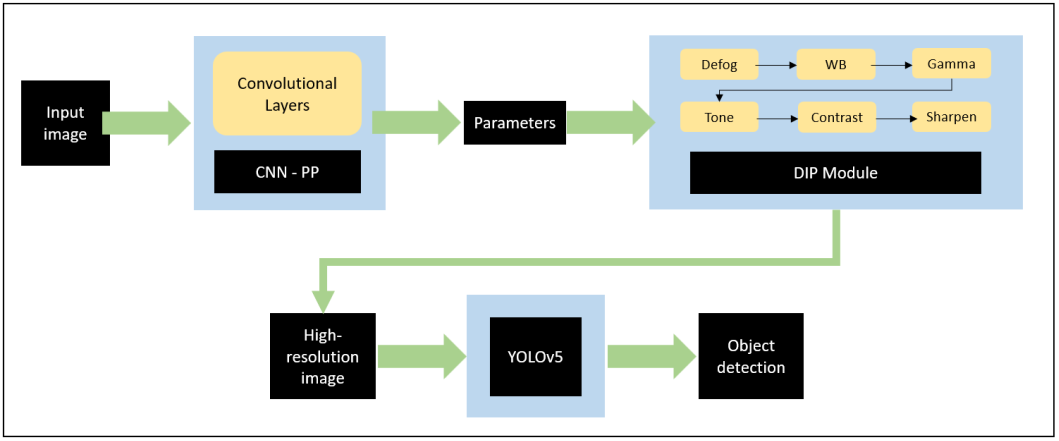
This project focuses on enhancing object detection in autonomous driving systems under challenging weather conditions like fog.
PythonPyTorchYOLOv5
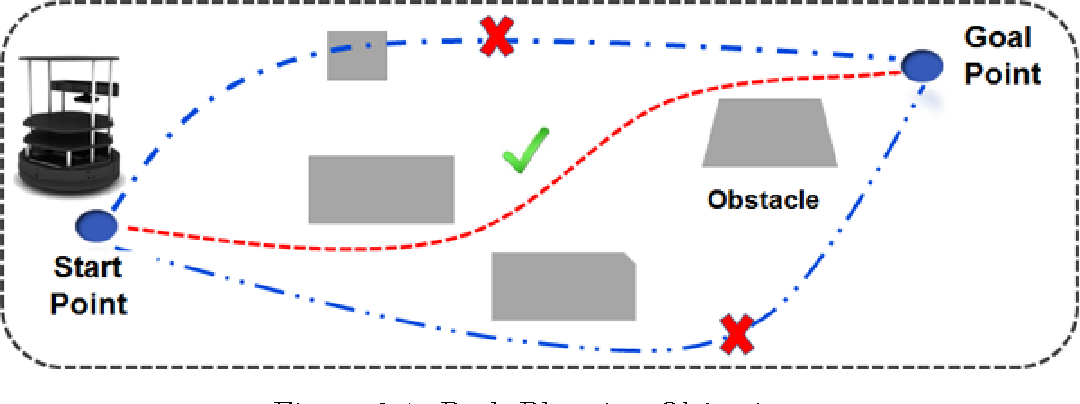
This project implements the Informed RRT* path planning algorithm and simulates the generated path using TurtleBot3 in the Gazebo environment.
PythonROS2Gazebo
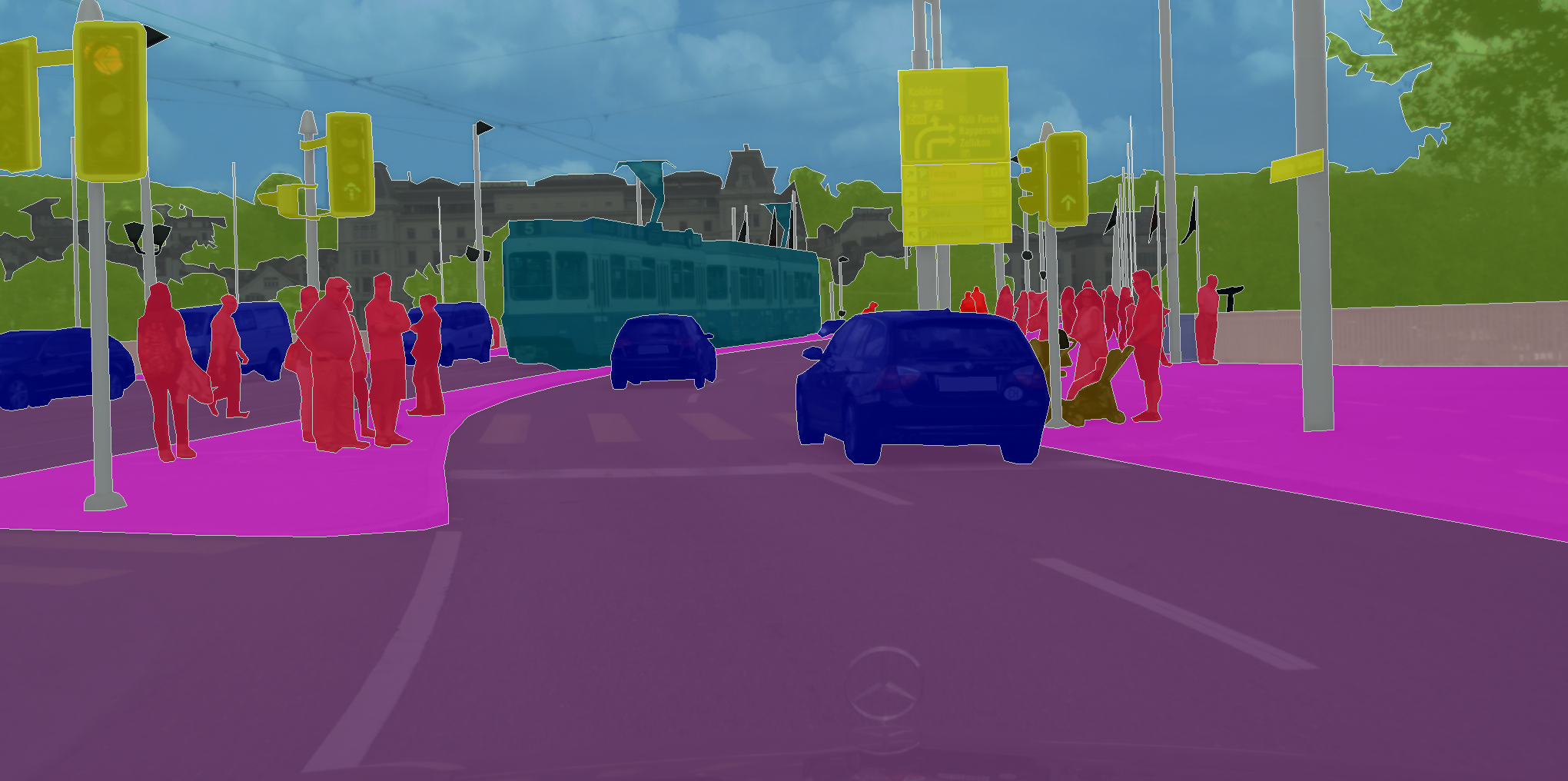
The project focuses on real-time semantic segmentation using a deep learning model called ENet.
PythonPyTorchCamVid dataset