Path Planning for Warehouse Robots Using Informed RRT* and ROS2
Project Overview
This project implements the Informed RRT* path planning algorithm and simulates the generated path using TurtleBot3 in the Gazebo environment. The algorithm efficiently finds an optimal path between a start and a goal position while avoiding obstacles.
Languages & Tech stack
- Python for implementation.
- ROS2 for the Robotics framework.
- Gazebo for simulation.
- Matplotlib for visualization.
- numpy, geometry_msgs, nav_msgs libraries used
Methodology
- Informed RRT* Algorithm
- Generates a random tree structure within the search space.
- Expands towards a goal while avoiding obstacles.
- Uses heuristics to improve path efficiency.
- Optimizes paths dynamically as new nodes are added.
- Simulation in Gazebo
- The path computed by Informed RRT* is passed to TurtleBot3.
- TurtleBot3 moves through waypoints using ROS2 control messages.
- The robot’s pose updates dynamically based on odometry feedback.
- Simulation in Gazebo
- Explored states and the final path are displayed using Matplotlib.
- The robot’s movement is visualized within Gazebo.
Project Snippets
-
Path Visualization in Matplotlib
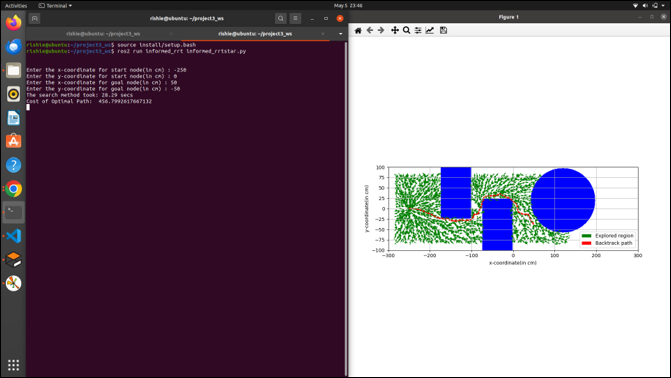
-
Path Simulation in Gazebo