Aruco-Assisted Navigation of a Warehouse Robot
Project Overview
This project focuses on developing a ROS2 package that enables a robot to navigate a warehouse environment using Aruco markers for guidance. While navigating, the robot detects and reports objects present in the environment. The key objectives include:
- Moving the robot through the environment by detecting Aruco markers.
- Executing predefined actions based on marker identification.
- Detecting and reporting the pose of objects in the environment.
Languages & Tech stack
- C++ for implementation.
- ROS2 for the Robotics framework.
- Gazebo for simulation.
Project Workflow
- Robot Navigation Logic
- Move forward until an Aruco marker is detected.
- Stop at ≤ 0.4m from the detected marker.
- Perform an action based on the marker ID.
- Continue navigating until the end marker is detected.
- Upon reaching the end, detect and report the pose of batteries.
- Object Detection and Pose Estimation
- The RGB camera detects Aruco markers and publishes data to /aruco_markers.
- The logical camera detects floating objects and publishes to /mage/advanced_logical_camera/image
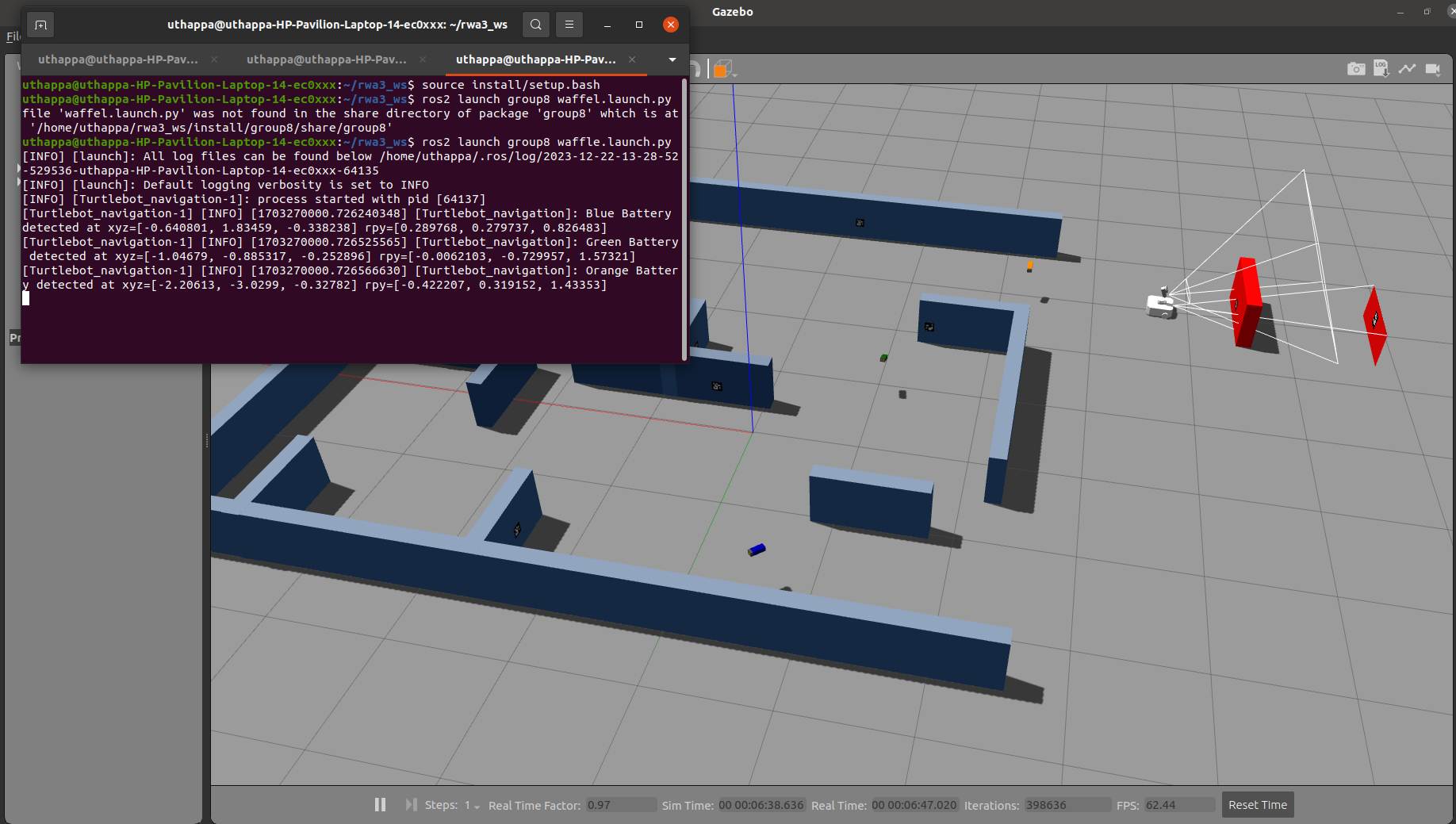
Project Snippets
- Navigation Simulation in Gazebo