Parameterized Defogging Network for Object Detection in Adverse Weather Conditions
Project Overview
This project focuses on enhancing object detection in autonomous driving systems under challenging weather conditions like fog. Adverse weather significantly degrades image quality, affecting the performance of real-time detection. To address this, the project introduces a Convolutional Neural Network-based Parameter Predictor (CNN-PP) that estimates optimal parameters for a Differentiable Image Processing (DIP) module. The DIP module enhances images by applying defogging, contrast adjustment, gamma correction, and sharpening before passing them to the YOLO-based object detection model. The proposed solution improves detection accuracy and efficiency, making autonomous navigation more reliable in complex environments.
Tech Stack
- Python for programming
- PyTroch for Deep Learning Framework
- YOLOv5 Object Detection Model
- Matplotlib for image visualization
Methodology
- Model Architecture
The system consists of three main components:
- CNN-Based Parameter Predictor (CNN-PP)
- Learns optimal parameters for image enhancement.
- Uses convolutional layers with Leaky ReLU activation to extract hierarchical image features.
- Differentiable Image Processing (DIP) Module
- Applies six differentiable filters based on CNN-PP outputs.
- Detection Network (YOLOv5)
- Processes the enhanced images to detect objects in foggy environments.
- Uses CSPDarknet53 backbone for feature extraction and Path Aggregation Network (PANet) for multi-scale feature fusion.
- CNN-Based Parameter Predictor (CNN-PP)
- Training Process
- The CNN-PP and DIP modules are trained together using an end-to-end hybrid training approach.
- The dataset consists of 367 images, with ⅔ being foggy images, resized to 256×256 pixels.
- The DIP-enhanced images are then passed through YOLOv5 for final detection.
- Performance Evaluation
- Compared YOLOv5 with and without the DIP module to measure detection improvement.
- Evaluated using mAP50, and mAP50-95 metrics.
Results
- Significant improvement in object detection accuracy on foggy images.
- Metric scores:
- mAP50 = 0.738
- mAP50-95 = 0.50
Project Snippets
-
Model Architecture
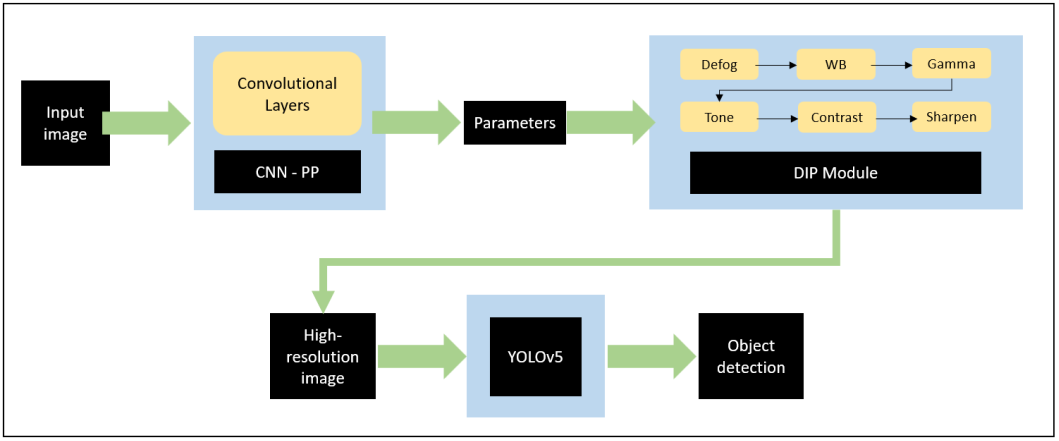
-
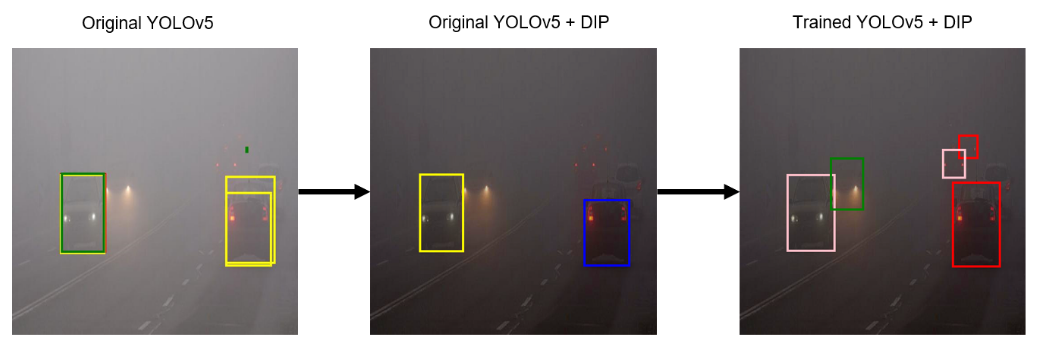
Image before and after Defogging
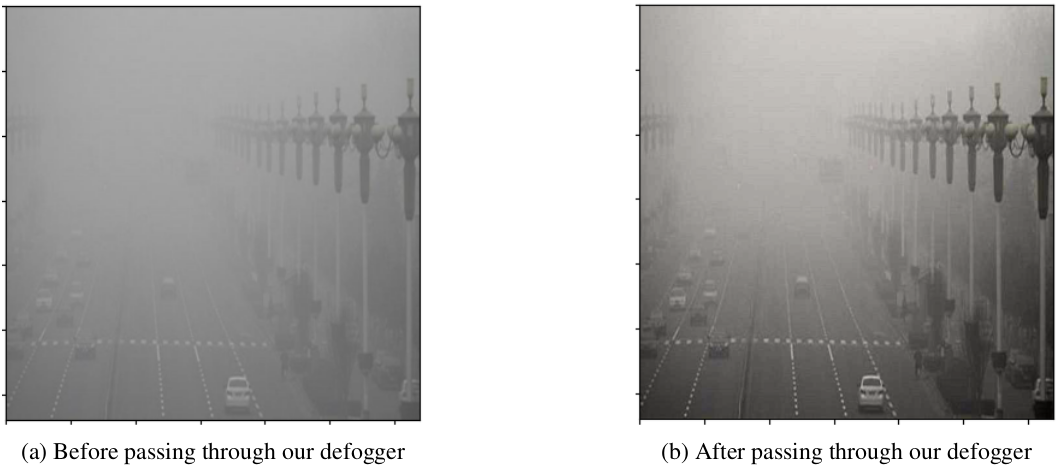
-
Object Detection Results